Many people might ask themselves: “Why Excel for an OSM map project?
Well, with OAM there is a stock of around 270 maps to manage with the most diverse settings.
For example, map symbols for petrol stations and drinking water sources in urban areas appear only at much higher zoom levels than in Scandinavia – for this, there is also the ELEMENTS theme by Tobias, which takes this into account. This means that different tag mappings have to be created and assigned to individual maps.
But also such trivial things as map centres, languages, fineness of elevation data, allocation to render queues (load balancing) have to be managed. Corresponding start-up programmes for each individual production step such as conversion of file formats, creation of boundary polys, elevation data, sea areas, inheritance of bike/MTB/hike routes etc,etc. – belong to !automated! production.
Last but not least, the web pages must be regenerated after each update.
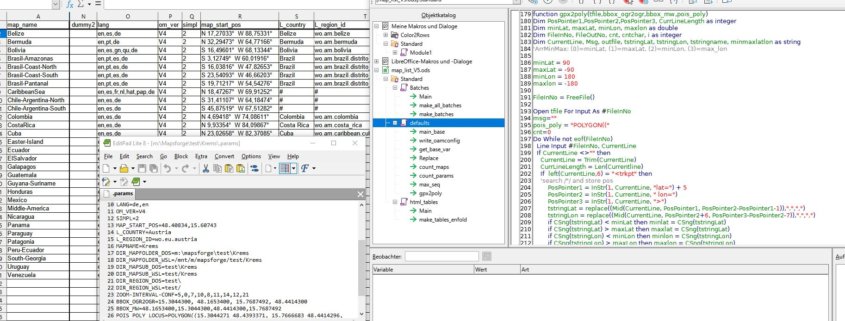
This is impossible to do manually, so far Excel-VBA programmes in combination with PERL scripts have done most of the hard work.
For about 10 days now, I have been sitting in front of the computer every free minute and porting VBA to Starbasic. Porting means cleaning up 9 years of organically grown programmes and simply rewriting them, leaving out my beloved PERL for pure administration jobs.
In addition, a flexible folder structure was implemented to allow porting to other machines and effective load balancing/caching.
With the switch to a free office package and the cleaning up of the programmes, it is now much easier for my co-authors to familiarise themselves with map production in OpenAndroMaps.
The first maps rolled out today from the LibreCalc generated start scripts, the automated creation of the download pages will be addressed next week.
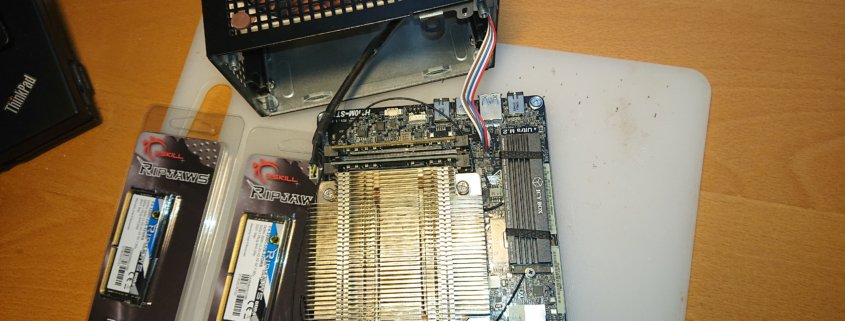
New rendering machine: Thank you very much for your donations – most of the parts for the PC have arrived and are awaiting assembly, which will be started after the next map update if there are no unexpected problems with the software port.
For me this is a great reassurance as it means that the test computer will go to @Michael and thus 10 years of accumulated knowledge about vector maps will be preserved.
There will be more detailed information about the new render machine.
Here in a nutshell: AMD Ryzen 5600G, 128GB RAM, ASUS MB, 2TB 970evo Plus as standard drive, 1TB Toshiba SSD for the planet extracts and height data, NOCTUA fans, new semi-passive power supply, as well as various used parts from the spare and new fans for the old case.
Should my time run out, this computer will also go to @Michael.
best wishes and stay healthy
Christian